Feed Back and Feed Forward Control
Feed Back and Feed Forward Control
Feed Back and Feed Forward Control
Chemical, Process, Petroleum and Petrochemical industries have large number of equipments which results in very large numbers of process variables and process parameters to be observed and controlled. Manually managing each and every variable and parameter is an impossible task and even if it is attempted to be done then it is unfeasible and uneconomical to do so.
Controllers are used in order to automate the process and control the process via a computer. All the variables, parameters and equipments can be watched and controlled from a control room. Every process is subject to some kind of disturbance. The effect of the disturbance is that the desired values of variables get changed. For instance if we desire a certain amount of purity of product and if due to some disturbance the purity gets affected then entire batch can become waste and has to be recycled again.
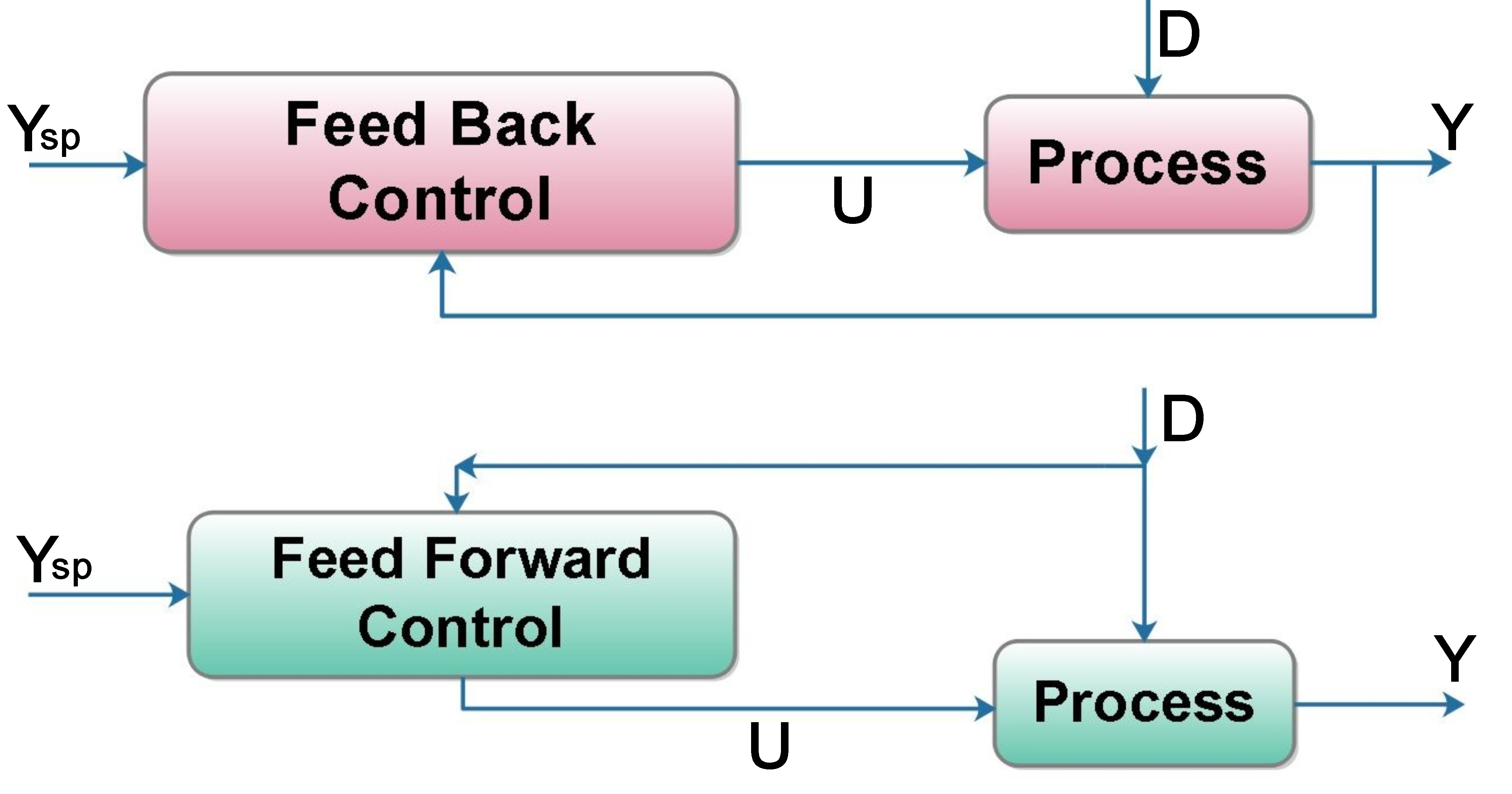
Feed Back and Feed Forward are two methods of control which is employed to make sure the values of the variables and parameters of the process stay in the desired range. If due to some disturbance the values starts to change then controller tried to bring them back at the desired value. The difference in them results due to the difference between the pathways.
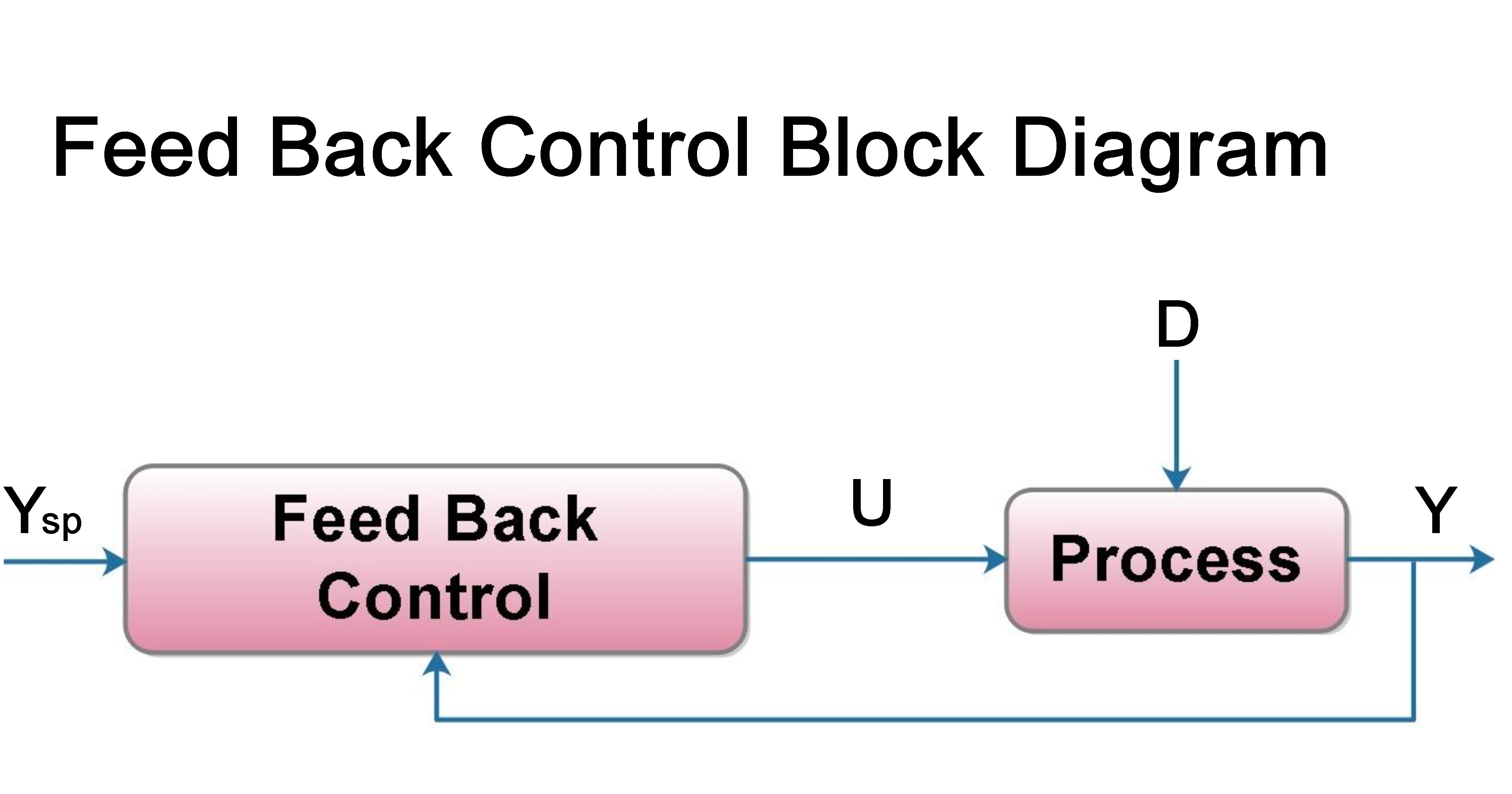
In the block diagram we have, a controlled variable (Y), manipulated variable (U), Disturbance (D). The block represents the Process itself.
The controlled variable (Y) is measured with the help of a sensor. The measurement is known as measured variable. The information of the measured variable is transferred to the controller. The controller compares the obtained measured variable value with the desired set point (Ysp). If both are same then no control action is needed.
If the disturbance (D) affects the process which leads to deviation of the value of the controlled variable (Y) from the setpoint (Ysp) then the controller will manipulate the variable U. The variables Y and U are related to each other; hence a variation in U can cause a variation in Y.
The greatest advantage of this control system is that it does not require any knowledge about the nature of the disturbance (D) or physical model of the process.
The drawback is that it starts corrective action after the disturbance affects the process.
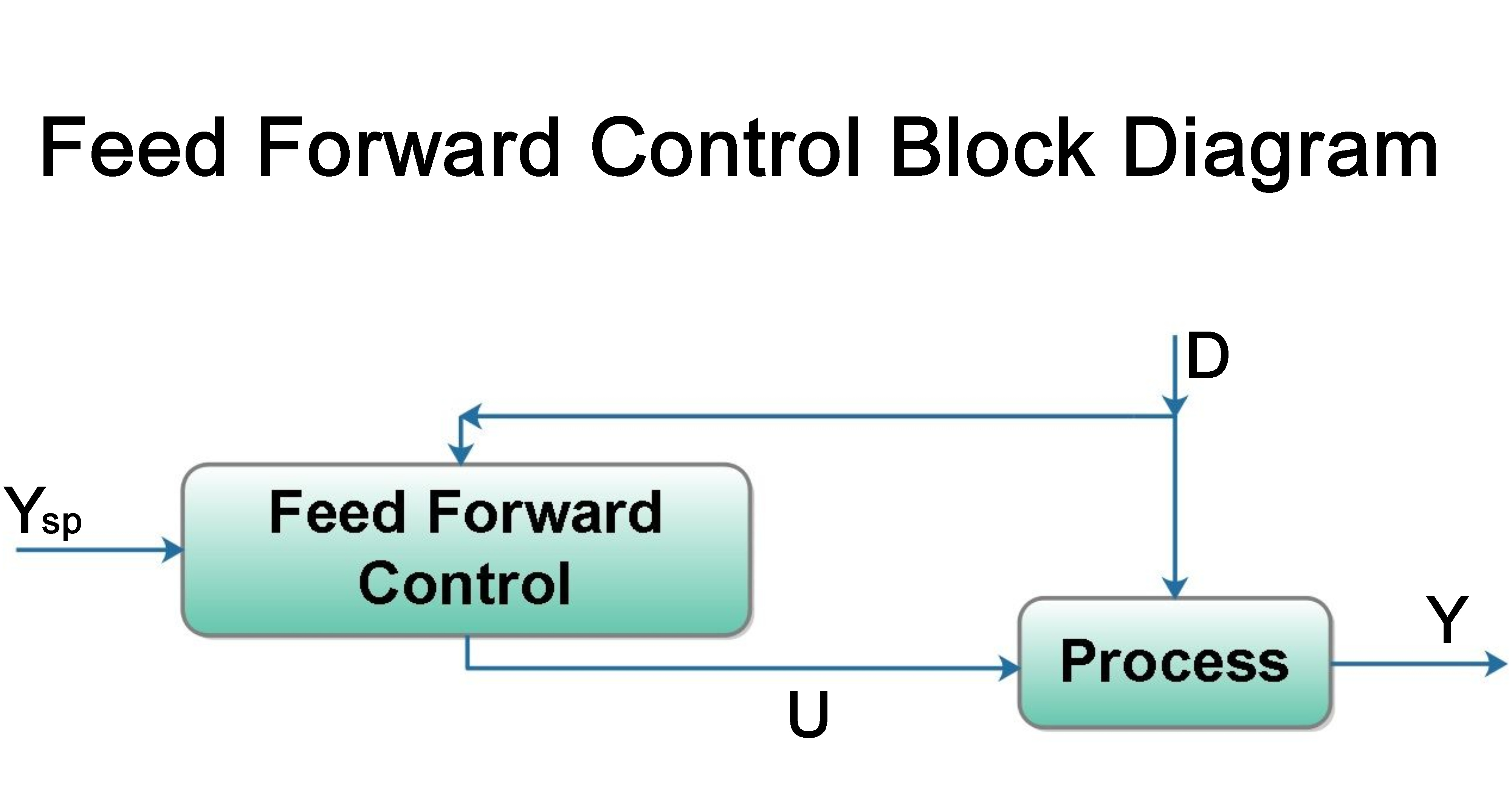
In this block diagram also, the variables represent the same terminology.
In this control system, a sensor is used to measure the disturbance (D) instead of the controlled variable (Y). The information of this measured disturbance (D) is sent to the controller. The controller then manipulates the variable U in such a way so as to prevent the effect which may be caused by the disturbance (D) on the process.
The advantage of this control system is that it starts to take corrective action before the disturbance has any effect on the operation of the process.
The disadvantage is that knowledge about the Physical model of the process is very important because this information is utilized by the controller in order to manipulate the variable U. Often exact models are not available hence approximate models are used to determine what is the relationship between controlled variable (Y), manipulated variable (U) and Disturbance (D). Another disadvantage is that it is very difficult to account for all the disturbances in the system. Some are qualitatively known but it is impossible or very difficult to measure them.
Reference:- instrumentationtools